Part 2- Tools for Text-Based AI: Jasper AI
3. What is Prompt Engineering?
Prompt engineering refers to the strategic crafting of input text (prompts) to guide Jasper AI in generating precise and contextually accurate outputs. Jasper does not understand content in a human sense — it predicts the next word based on input tokens. Hence, how you ask matters.
Key Prompt Engineering Techniques:
- Clear Instructions: Be specific about what you want.
- Example: "Write a 100-word product description for a fitness tracker for millennials."
- Defined Roles and Tone:
- Example: "Act as a professional chef and explain how to cook a lasagna."
- Jasper understands roles and adapts tone (funny, formal, professional, casual).
- Contextual Background:
- Give Jasper more context to avoid generic answers.
- Example: "For a LinkedIn post targeting freelance designers, write a short post about the importance of building a personal brand."
- Constraints & Formatting:
- Example: "List 5 bullet points highlighting the features of an AI writing tool."
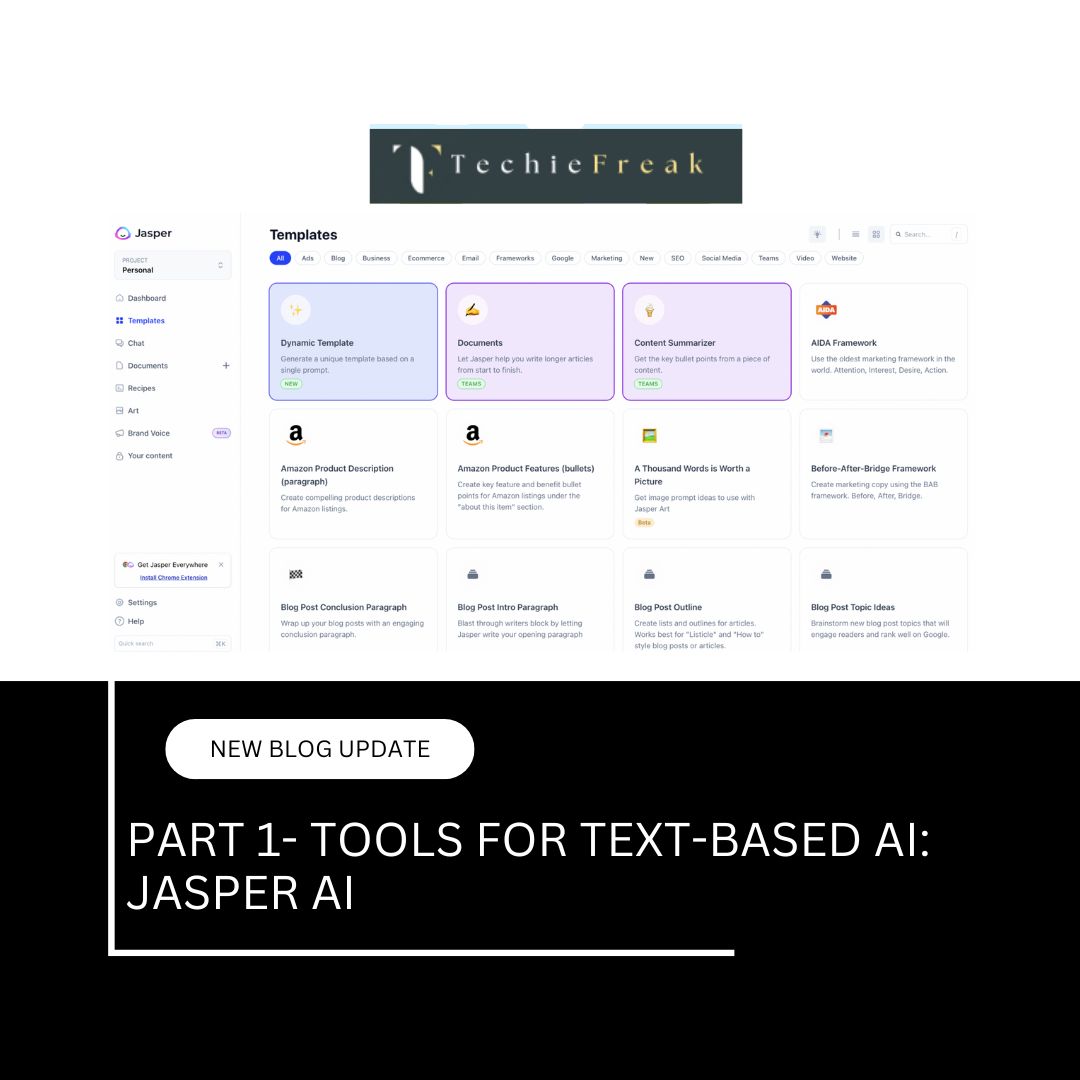
3.2 Jasper Recipes
Recipes are reusable prompt workflows. Each recipe includes a series of steps/prompts to automate a writing process.
Example: Blog Post Recipe
- Command: "Write a blog post title about AI in education."
- Command: "Generate an engaging intro paragraph."
- Command: "List 5 main points with headers."
- Command: "Write a conclusion paragraph."
Users can create and share their own recipes to streamline repetitive tasks.
3.3 Real-World Use Cases
A. Marketing & Advertising
- Ad copy for Facebook, Google Ads, and Instagram.
- Slogan/Tagline generation
- Email marketing content (newsletters, welcome series)
B. SEO & Blogging
- Keyword-optimized blog post creation
- Meta title and description generation
- Blog topic ideas
C. E-commerce
- Product descriptions at scale
- Category content
- Upsell/cross-sell email scripts
D. Social Media
- Captions and hashtags for Instagram, LinkedIn, Twitter
- Long-form LinkedIn posts
- Script ideas for Reels, TikToks, and YouTube Shorts
E. Internal Business Writing
- Meeting summaries
- Internal memos
- Company bios or About Us pages
3.4 Example Prompts & Outputs
Prompt: "Write a professional product description for a minimalist leather wallet."
Jasper Output:
"Crafted with precision and elegance, our minimalist leather wallet offers seamless functionality without the bulk. Made from premium full-grain leather, it features space for up to six cards and a hidden cash compartment, making it the perfect companion for modern professionals."
Prompt: "Create a LinkedIn post for a freelance UI/UX designer announcing new project availability."
Jasper Output:
"Excited to announce I have a few open slots for new UI/UX design projects! 🚀 Whether you're launching a startup or refreshing your digital experience, let's collaborate to make your product shine. DM me or visit my portfolio to get started."
4. Advanced Features and Integrations in Jasper AI
4.1 Jasper Brand Voice
One of Jasper AI’s standout capabilities is its ability to learn and maintain a brand voice. This feature is particularly valuable for businesses and marketing teams that need content to consistently reflect their tone, language style, and values across different platforms.
How It Works:
- You input examples of existing branded content such as blog posts, emails, or product descriptions.
- Jasper analyzes these samples to extract stylistic patterns (tone, structure, vocabulary).
- The system then generates future content in a similar voice.
Benefits:
- Maintains consistency across channels (website, emails, ads)
- Reduces the need for excessive post-editing
- Tailors content for target audience alignment
4.2 Jasper Art
Jasper Art is an AI-powered image generation tool integrated into the Jasper ecosystem. It allows users to create custom visuals using text prompts, supporting written content with relevant graphics.
Features:
- Choose visual styles: realistic, abstract, 3D, cartoon, etc.
- Use prompts like: “Create a futuristic city skyline at sunset in cyberpunk style.”
- Combine Jasper-written content with Jasper-generated images for blog headers, ads, or social media creatives.
Use Cases:
- Blog illustrations
- Social media graphics
- Advertising creatives
4.3 Integration with Surfer SEO
Jasper integrates with Surfer SEO, an on-page SEO optimization tool, allowing users to write SEO-friendly blog posts within the Jasper platform.
How It Works:
- Enter your primary keyword.
- Surfer SEO suggests optimal content length, keyword density, and semantic terms.
- Jasper uses this data to generate content aligned with current SEO best practices.
Benefits:
- Rank higher on Google
- Reduce dependency on external SEO tools
- Save time during keyword optimization
4.4 Jasper Chrome Extension
Jasper’s Chrome extension allows you to bring the power of Jasper to any text field online, including:
- Emails
- Google Docs
- Content Management Systems (CMS)
Use Cases:
- Rewriting email replies in Gmail
- Generating responses for customer support chats
- Enhancing LinkedIn engagement with professional or witty comments
4.5 Team Collaboration & Workspaces
Jasper supports team collaboration, making it suitable for marketing teams and content agencies.
Features:
- Invite team members to a shared workspace
- Assign content tasks and track status
- Save brand voice documents and shared templates
- Enable content versioning and editing permissions
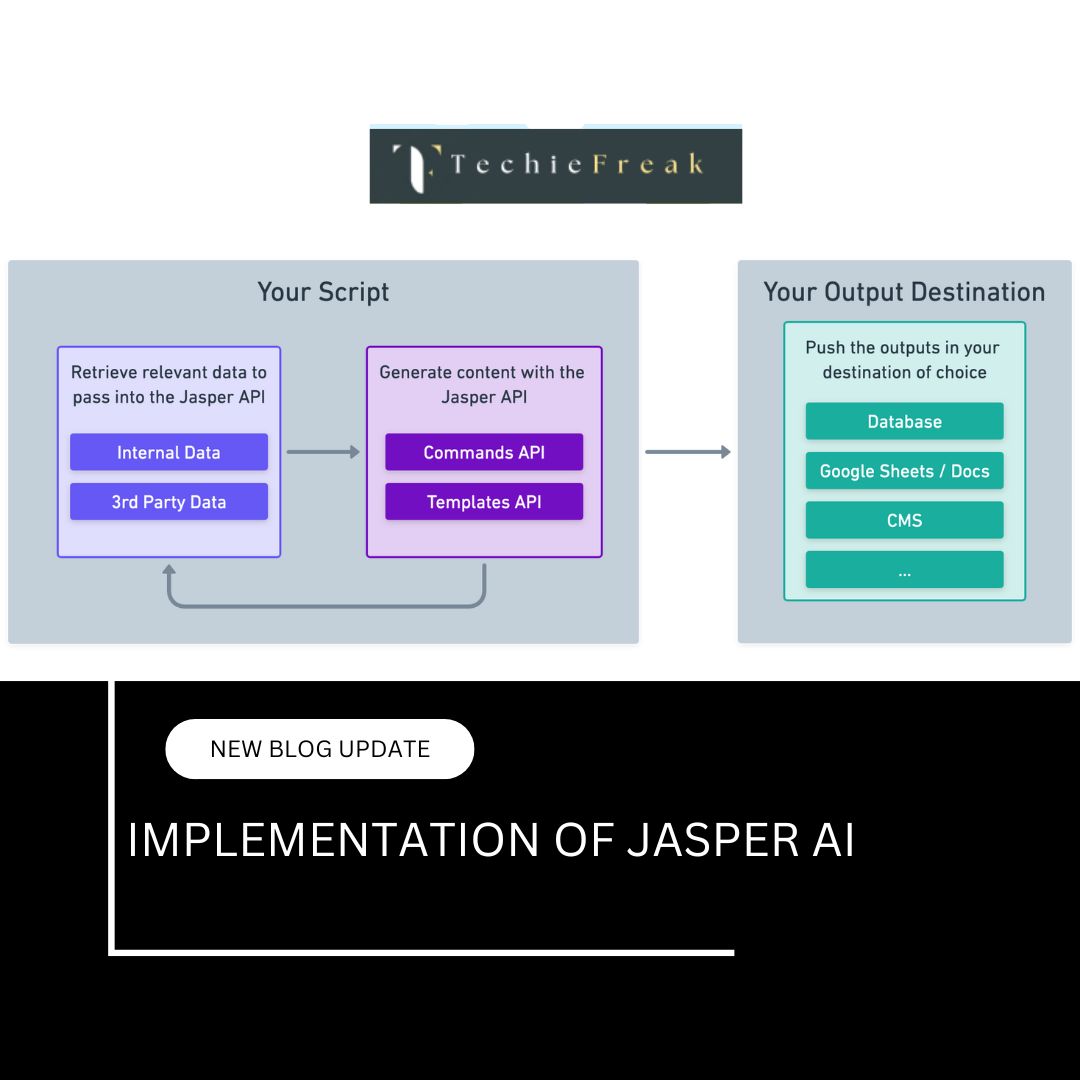
4.6 API Access for Developers
Jasper also offers an API (available on request) that allows companies to integrate Jasper’s writing capabilities into:
- Custom dashboards
- Content Management Systems
- Automated workflows and internal tools
Example Use Case:
- A SaaS company could automatically generate product descriptions in Jasper using structured product data pulled from a spreadsheet or CMS.
4.7 Third-Party Integrations
Jasper supports various integrations to extend its functionality:
- Zapier – automate workflows (e.g., auto-generate social posts when a blog is published)
- Grammarly – ensure grammar and clarity in AI-generated content
- Copyscape – check for plagiarism in long-form articles
- Content Management Tools – such as WordPress or HubSpot for direct publishing
5. Jasper AI Limitations, Ethics, and Responsible Usage
5.1 Understanding the Limitations of Jasper AI
While Jasper AI is a powerful content creation tool, it's essential to recognize its boundaries to use it effectively and responsibly.
A. Factual Inaccuracy (Hallucination)
Jasper may sometimes generate content that sounds confident but is factually incorrect. This occurs because the model predicts words based on patterns, not verified truth.
Example:
A blog post generated by Jasper might state outdated or incorrect statistics unless manually corrected.
Best Practice: Always fact-check AI-generated content, especially when citing data, names, or industry-specific claims.
B. Repetition and Redundancy
In long-form writing, Jasper might repeat the same idea in different ways or insert unnecessary filler to meet length requirements.
Best Practice: Edit output to ensure clarity and avoid redundancy.
C. Dependency on Prompt Quality
Jasper's output heavily depends on the quality and clarity of your input prompt. Vague prompts often lead to generic or irrelevant results.
Best Practice: Use detailed and directive prompts with clear tone, purpose, and context.
D. No Real-Time Data Access
Jasper does not pull information from live web sources. Its knowledge is limited to the data available up to its training cut-off or connected plugins (if any).
Best Practice: For time-sensitive or trending content, manually include updated data or combine Jasper with research tools.
E. Language Bias and Sensitivity
Like all AI models trained on vast text datasets, Jasper may reflect subtle biases or inappropriate assumptions present in its training data.
Best Practice: Review sensitive content carefully and apply human editorial judgment, especially for topics related to gender, race, religion, or culture.
5.2 Ethical Use of Jasper AI
As AI-generated content becomes more prevalent, ethical usage plays a critical role in maintaining trust, transparency, and compliance.
A. Avoiding Misinformation
Never use Jasper to create misleading headlines, false product claims, or deceptive information.
Example: Do not generate fake testimonials or reviews using AI.
B. Content Attribution
If AI is used to generate significant parts of an article, especially in journalism, academic, or professional writing, consider disclosing AI assistance transparently.
C. Respecting Intellectual Property
Do not use Jasper to replicate or paraphrase copyrighted materials without proper credit or permission.
Best Practice: Always create original prompts and use AI for ideation or assistance, not for copying others’ work.
D. Safeguarding User Privacy
When using Jasper to write about individuals, clients, or case studies, avoid inputting sensitive personal data without consent.
Example: Never input real client names, emails, or confidential project details into prompts.
E. Promoting Inclusivity and Non-Discrimination
Ensure that Jasper-generated content is inclusive, respectful, and does not reinforce harmful stereotypes.
Best Practice: Set ethical guidelines for AI content in your organization and review outputs accordingly.
5.3 Building an Ethical AI Content Workflow
To align AI tools like Jasper with organizational values, consider the following workflow:
- Prompt Clarity: Define objective, tone, and audience clearly.
- AI Generation: Use Jasper for first drafts or creative inputs.
- Human Oversight: Review, fact-check, and edit content manually.
- Compliance Check: Verify adherence to legal, copyright, and brand guidelines.
- Final Approval: Only publish content after human review and ethical screening.

.jpg)

.jpg)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)