Deep Reinforcement Learning: A Comprehensive Guide to Deep Q-Networks (DQN)
1. Introduction to Deep Q-Networks (DQN)
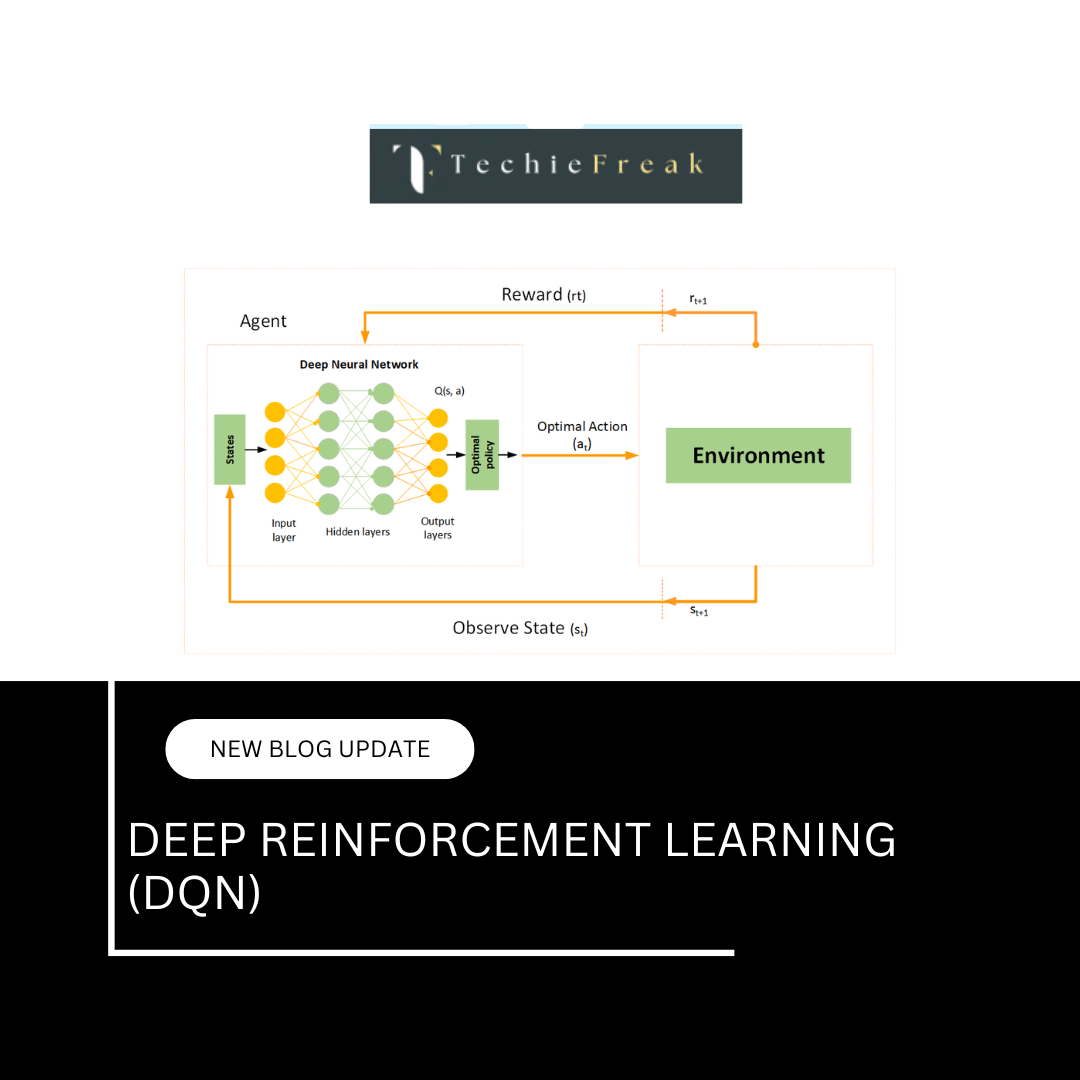
Deep Q-Networks (DQN) mark a significant advancement in Deep Reinforcement Learning (DRL). Developed by DeepMind in 2015, DQN combines traditional Q-learning with deep neural networks (DNNs) to handle complex, high-dimensional environments.
Unlike traditional Q-learning, which struggles with large state-action spaces, DQN can learn directly from raw sensory input, such as images, making it highly effective in Atari games, robotics, and autonomous navigation.
2. The Fundamentals of Q-Learning
DQN is built upon the foundation of Q-learning, a model-free reinforcement learning algorithm that learns an optimal Q-function:

Key Parameters:
- Q(s, a): Expected reward for taking action aa in state s.
- α: Learning rate (how much new information overrides old information).
- γ: Discount factor (determines the importance of future rewards).
- r: Immediate reward for taking action a.
- s′: Next state.
- a′: Next action.
Limitations of Traditional Q-Learning:
- Inefficiency in Large State Spaces:
- Storing a Q-table for all state-action pairs is infeasible in complex environments.
- Correlated Learning Samples:
- Consecutive training updates introduce correlations, making learning unstable.
- Non-stationary Targets:
- As Q-values update, target values shift, making convergence difficult.
3. How DQN Overcomes Q-Learning’s Limitations
DQN enhances traditional Q-learning by integrating deep learning techniques, solving large-scale reinforcement learning problems efficiently.
Key Innovations in DQN:
- Deep Neural Networks as Function Approximators
- Instead of storing Q-values in a table, DQN trains a deep neural network (DNN) to approximate Q(s, a).
- The input is the state s, and the output is Q-values for all possible actions.
- Experience Replay (Memory Buffer)
- Stores past experiences (s, a,r,s′) in a replay buffer.
- Randomly samples mini-batches for training to reduce correlations.
- Helps the network learn more stable Q-values.
- Target Network for Stable Learning
- Maintains a separate target network with weights θ−.
- Updates the target network periodically rather than at every step, preventing diverging Q-values.
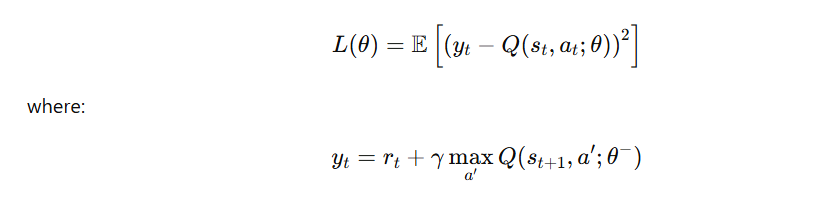
DQN Loss Function
DQN minimizes the error between the predicted Q-value and the target Q-value:
4. The Deep Q-Network Algorithm
Step-by-Step Breakdown
- Initialize
- A deep Q-network Q(s, a;θ) with random weights.
- A target network Q(s, a;θ−)(initially identical to the main network).
- An experience replay buffer.
- For each episode:
- Observe the initial state s0\.
- Repeat for each time step tt:
- Select action at using ε-greedy policy:
- With probability ϵ, select a random action (exploration).
Otherwise, choose the best action:
- Execute action at, observe reward rt, and new state st+1.
- Store experience (st,at, rt,st+1) in replay buffer.
Sample a mini-batch from the buffer and compute the target Q-values:

- Update the DQN model by minimizing the loss function.
- Periodically update target network weights: θ−=θ
- Select action at using ε-greedy policy:
- Repeat until convergence.
5. Enhancements to DQN
1. Double Deep Q-Networks (DDQN)
- Problem with DQN: Standard Deep Q-Networks (DQN) tend to overestimate Q-values. This happens because the same network is used both for selecting actions and evaluating their Q-values, leading to an optimistic bias that can cause unstable learning.
- Solution in DDQN: It uses two separate networks:
- Main (Online) Network – Selects the best action based on learned Q-values.
- Target Network – Evaluates the Q-value of that selected action.

- Prevents over-optimistic value estimates.
2. Dueling DQN
- Issue with Regular DQN: In some states, the choice of action doesn’t matter much (e.g., waiting in a traffic light in a self-driving car). Standard DQNs still calculate Q-values for all actions, which is inefficient.
- Solution in Dueling DQN: It separates the state-value from the advantage of actions:
- State-value function: Measures how good it is to be in a certain state.
- Advantage function: Measures how much better a particular action is compared to the average.

- Helps distinguish between valuable states and optimal actions, improving training.
3. Prioritized Experience Replay
- Issue with Standard Experience Replay:
- In normal experience replay, we randomly sample past experiences, but not all experiences are equally useful for learning.
- Solution with PER:
- Instead of random sampling, we prioritize experiences that have higher TD-error (difference between predicted and actual Q-values).
- TD-error is a signal for how much the model can still learn from a transition.
- Mathematical Concept:
- Assign priority to each experience based on its absolute TD-error:

- Use stochastic sampling (not purely greedy) to ensure exploration.
- Why It Works:
- Focuses on important experiences (high error).
- Leads to faster convergence.
- Helps the agent learn from rare but critical transitions.
6. Applications of DQN
1. Gaming
- Atari Games: DQN achieved superhuman performance in games like Pong and Breakout.
- Chess & Go: Variants like AlphaGo used DQN for strategic decision-making.
2. Robotics
- Autonomous Navigation: Robots learn to move efficiently.
- Dexterous Manipulation: DQN-based robotic arms master complex tasks.
3. Autonomous Vehicles
- Path Planning: Self-driving cars optimize safe, efficient routes.
- Traffic Management: AI-driven policies reduce congestion.
4. Finance
- Algorithmic Trading: AI adapts to market trends and optimizes trade execution.
- Portfolio Optimization: Balances risk vs. reward using reinforcement learning.
7. Implementation: Deep Q-Network in Python (TensorFlow/PyTorch)
Here’s a simplified DQN implementation using PyTorch:
import torch
import torch.nn as nn
import torch.optim as optim
import random
import numpy as np
import gym
from collections import deque
# Define DQN Network
class DQN(nn.Module):
def __init__(self, state_dim, action_dim):
super(DQN, self).__init__()
self.fc1 = nn.Linear(state_dim, 128)
self.fc2 = nn.Linear(128, 128)
self.fc3 = nn.Linear(128, action_dim)
def forward(self, x):
x = torch.relu(self.fc1(x))
x = torch.relu(self.fc2(x))
return self.fc3(x)
# Hyperparameters
gamma = 0.99 # Discount factor
epsilon = 1.0 # Exploration rate
epsilon_min = 0.01
epsilon_decay = 0.995
lr = 0.001
batch_size = 64
memory_size = 10000
target_update = 10 # Frequency of updating target network
episodes = 500
# Initialize environment
env = gym.make("CartPole-v1")
state_dim = env.observation_space.shape[0]
action_dim = env.action_space.n
# Initialize networks and memory
dqn = DQN(state_dim, action_dim)
target_dqn = DQN(state_dim, action_dim)
target_dqn.load_state_dict(dqn.state_dict()) # Copy weights
optimizer = optim.Adam(dqn.parameters(), lr=lr)
memory = deque(maxlen=memory_size)
def select_action(state, epsilon):
if random.random() < epsilon:
return env.action_space.sample() # Explore
else:
state = torch.FloatTensor(state).unsqueeze(0)
with torch.no_grad():
return dqn(state).argmax().item() # Exploit
def train():
if len(memory) < batch_size:
return
batch = random.sample(memory, batch_size)
states, actions, rewards, next_states, dones = zip(*batch)
states = torch.FloatTensor(states)
actions = torch.LongTensor(actions).unsqueeze(1)
rewards = torch.FloatTensor(rewards)
next_states = torch.FloatTensor(next_states)
dones = torch.FloatTensor(dones)
q_values = dqn(states).gather(1, actions).squeeze()
with torch.no_grad():
next_q_values = target_dqn(next_states).max(1)[0]
target_q_values = rewards + gamma * next_q_values * (1 - dones)
loss = nn.MSELoss()(q_values, target_q_values)
optimizer.zero_grad()
loss.backward()
optimizer.step()
# Training loop
for episode in range(episodes):
state = env.reset()
state = state[0] # Unwrap state
total_reward = 0
done = False
while not done:
action = select_action(state, epsilon)
next_state, reward, done, _, _ = env.step(action)
memory.append((state, action, reward, next_state, done))
state = next_state
total_reward += reward
train()
# Decay epsilon
epsilon = max(epsilon_min, epsilon * epsilon_decay)
# Update target network
if episode % target_update == 0:
target_dqn.load_state_dict(dqn.state_dict())
print(f"Episode {episode+1}, Reward: {total_reward}, Epsilon: {epsilon:.4f}")
env.close()
Explanation of Key Components
- DQN Network
- A simple 3-layer neural network to approximate Q-values for given states.
- Experience Replay (Deque Memory)
- Stores past experiences and samples them randomly to break the correlation in training data.
- Epsilon-Greedy Exploration
- Starts with high exploration (ϵ=1.0\epsilon = 1.0ϵ=1.0) and decays over time to shift towards exploitation.
- Target Network
- Updated every 10 episodes to stabilize training and prevent frequent weight changes.
- Training Loop
- Runs for 500 episodes, interacting with the environment and learning from experience.
Expected Output
During training, you'll see episode rewards improving as the model learns:
Episode 1, Reward: 12, Epsilon: 0.9950
Episode 10, Reward: 20, Epsilon: 0.9044
Episode 50, Reward: 150, Epsilon: 0.3660
Episode 100, Reward: 200, Epsilon: 0.1353
...
Episode 500, Reward: 500, Epsilon: 0.01008. Conclusion
Deep Q-Networks (DQN) have transformed reinforcement learning by enabling AI to learn from high-dimensional environments. With enhancements like DDQN, Dueling DQN, and Prioritized Experience Replay, DQN remains a foundational algorithm in modern AI research and applications.

.jpg)

.jpg)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)
.png)